Overview

This project showcases the complete development of a robotic arm, covering:
- Modeling & Design: 3D modeling and simulation
- Realization: 3D printing and assembly
- Kinematics Study: Forward Kinematics (FK) & Inverse Kinematics (IK)
- Control Systems: Motion control and actuation
- Programming: Microcontroller integration
- Application Development: Controlling the robotic arm using Android
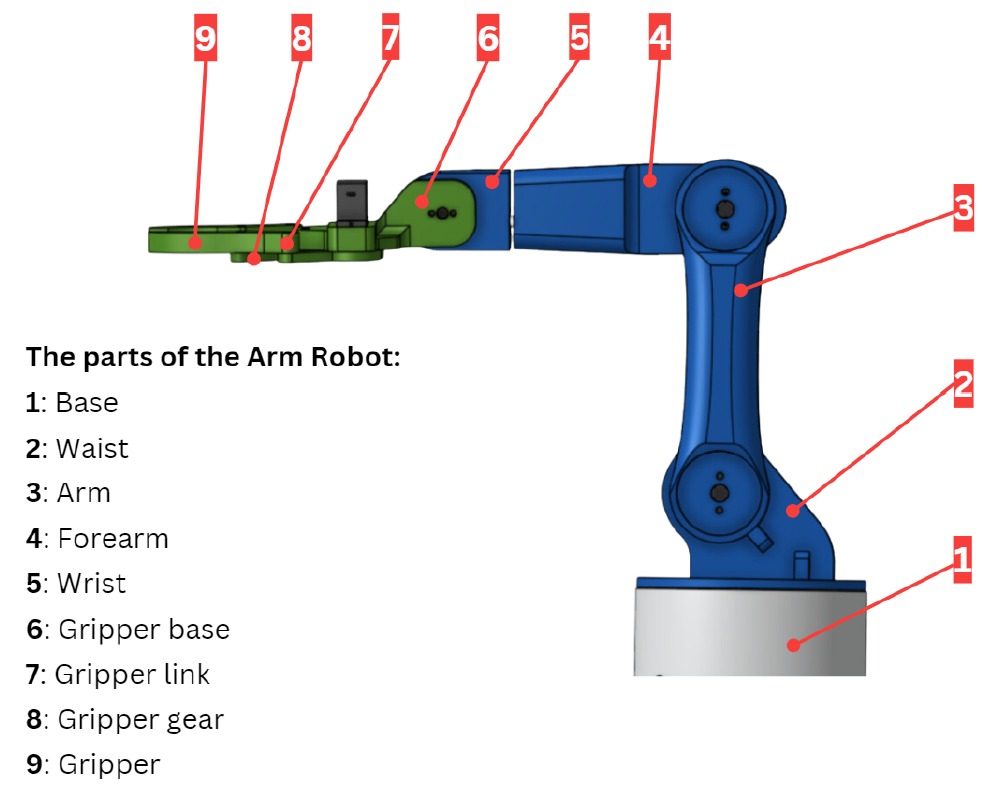
1️⃣ Modeling & Realization
Using CAD software, the robotic arm is designed, simulated, and optimized before fabrication. The final design is 3D printed, ensuring mechanical feasibility.
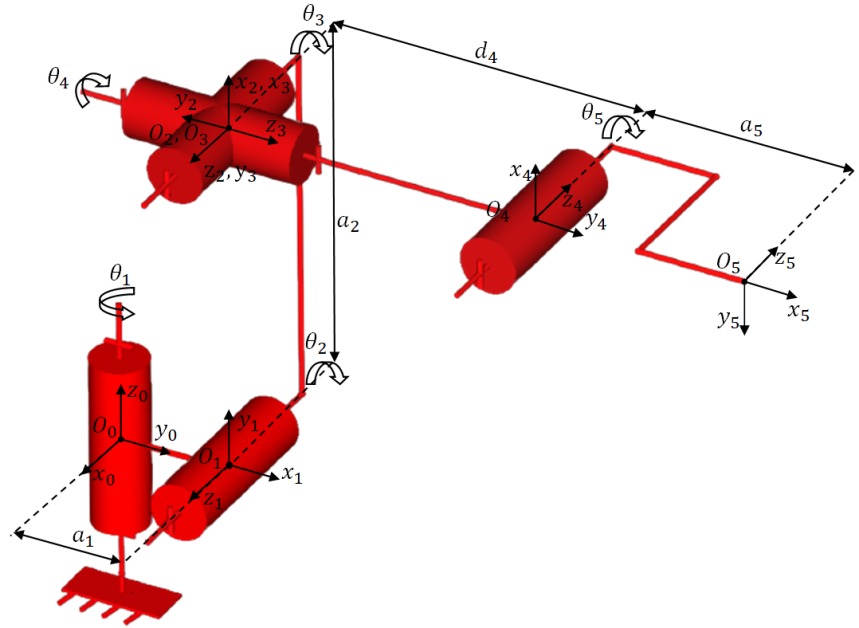
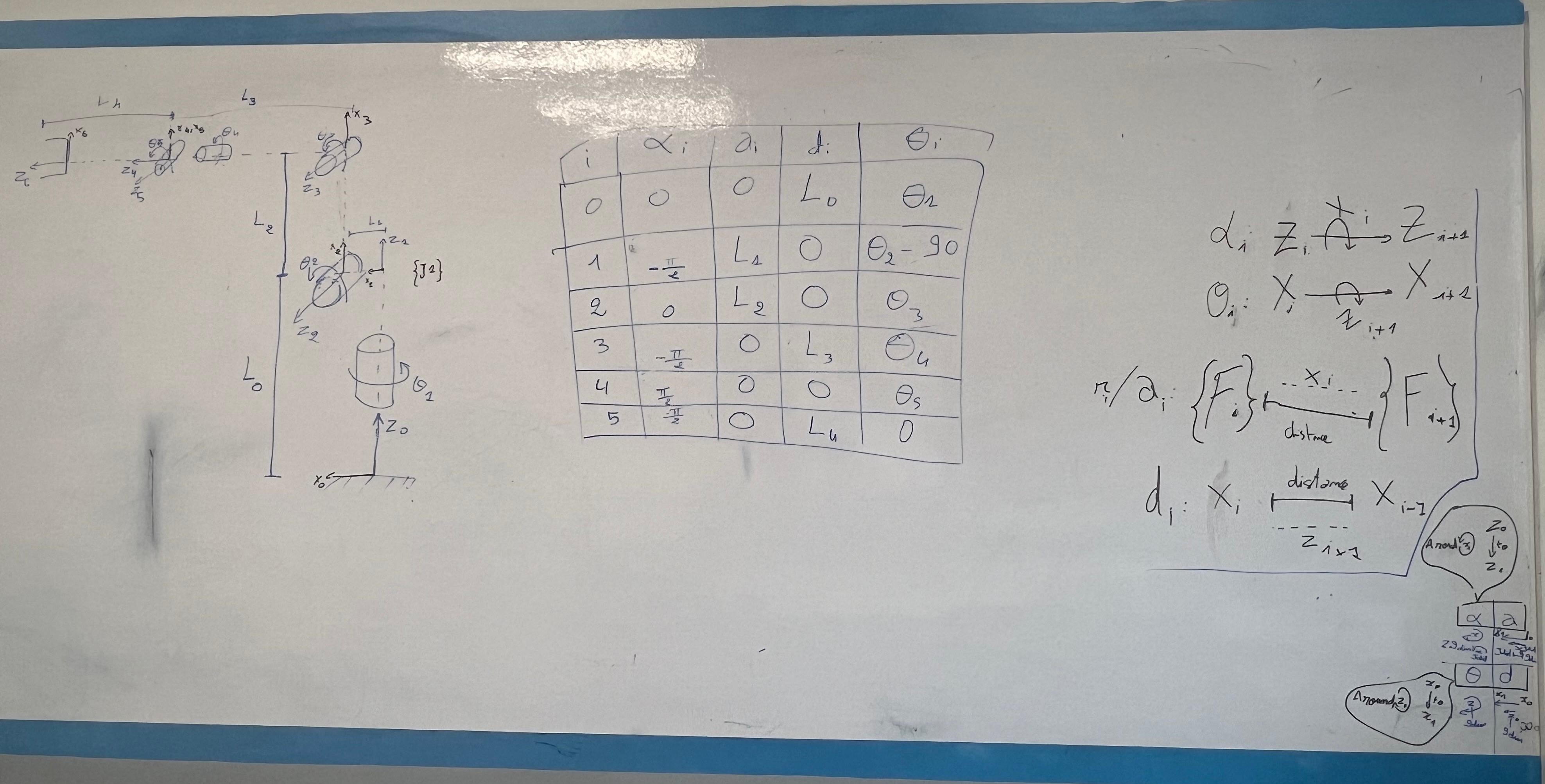
2️⃣ Kinematics Study (FK & IK)
A mathematical analysis of the robotic arm’s movement is conducted using:
- Forward Kinematics (FK): Predicting the end-effector position based on joint angles.
- Inverse Kinematics (IK): Calculating joint angles required to reach a specific position.
3️⃣ Control Implementation
The robotic arm is controlled via:
- PID control for smooth motion
- Trajectory planning algorithms
- Integration with microcontrollers for real-time actuation
The control system is implemented using C++
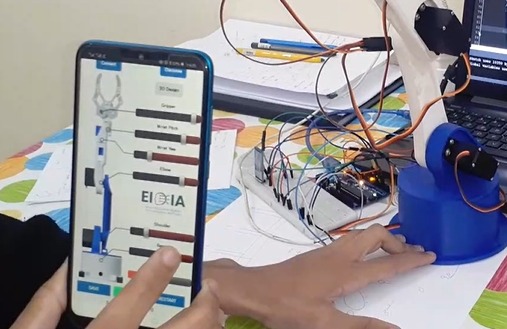
4️⃣ Application with Android
A graphical user interface (GUI) is developed using Android to allow real-time control of the robotic arm. This enhances usability for interactive applications.
Results & Future Work
The robotic arm successfully executes programmed tasks with precise control and real-time feedback.
Future improvements include:
- AI-based motion planning
- Enhanced control accuracy
- Integration with computer vision
Contributors
- Errouji Oussama
- Imad-Eddine NACIRI
- Jade Bousliman