 GitHub Repository
GitHub Repository
Overview
This project explores the implementation of a fuzzy logic-based navigation system for a mobile robot using a differential drive mechanism. The objective was to design a controller capable of guiding the robot from a starting position to a target location while avoiding obstacles and optimizing movement efficiency.
Technologies Used
- Programming & Simulation: MATLAB, Simulink
- Control Technique: Fuzzy Logic Controller
- Robot Model: Differential Drive Robot
- Input Variables:
- Error in X position
- Error in Y position
- Error in orientation (Theta)
- Output Variables:
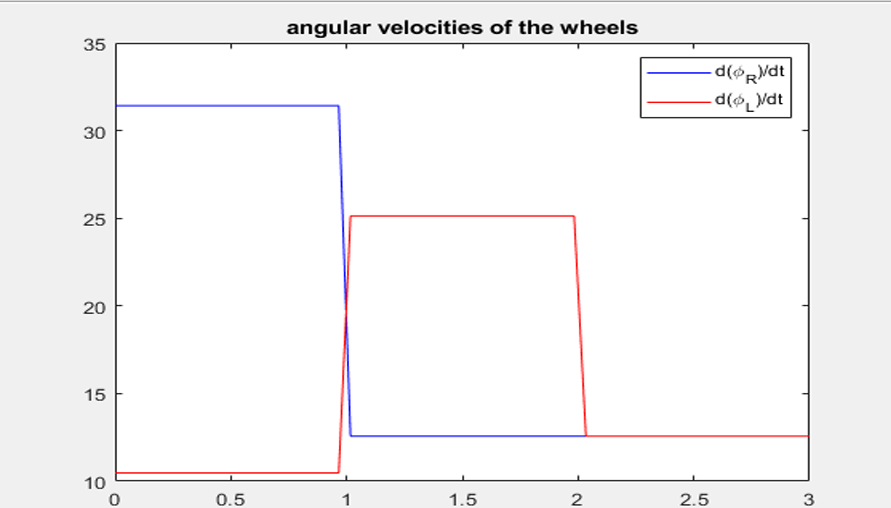
- Speed of the left wheel
- Speed of the right wheel
Implementation Details
- Development of Fuzzy Logic Controller
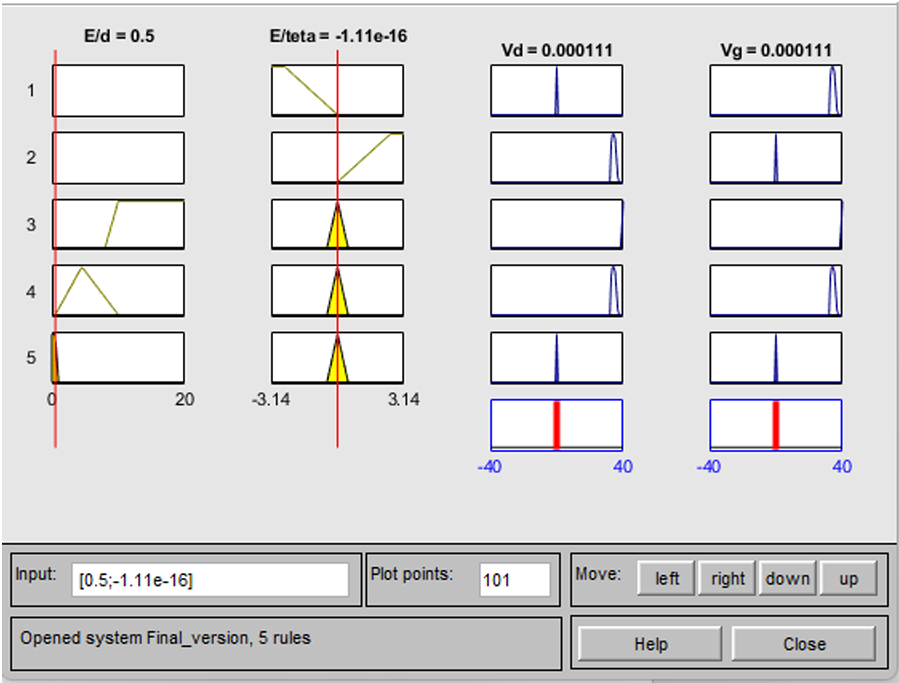
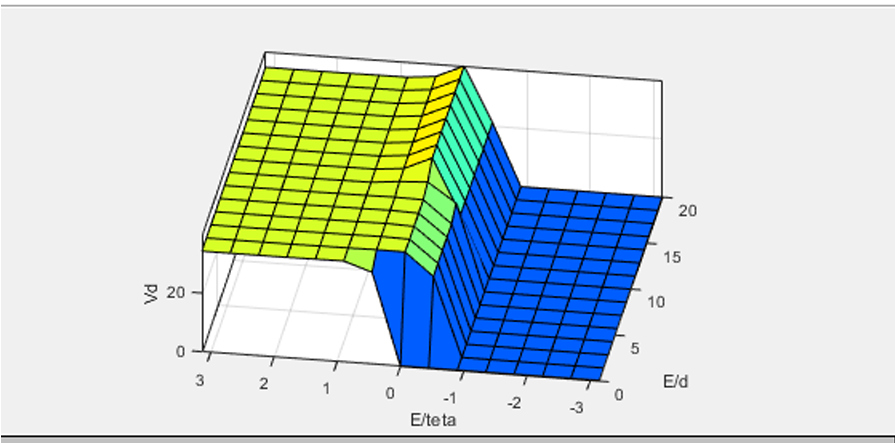
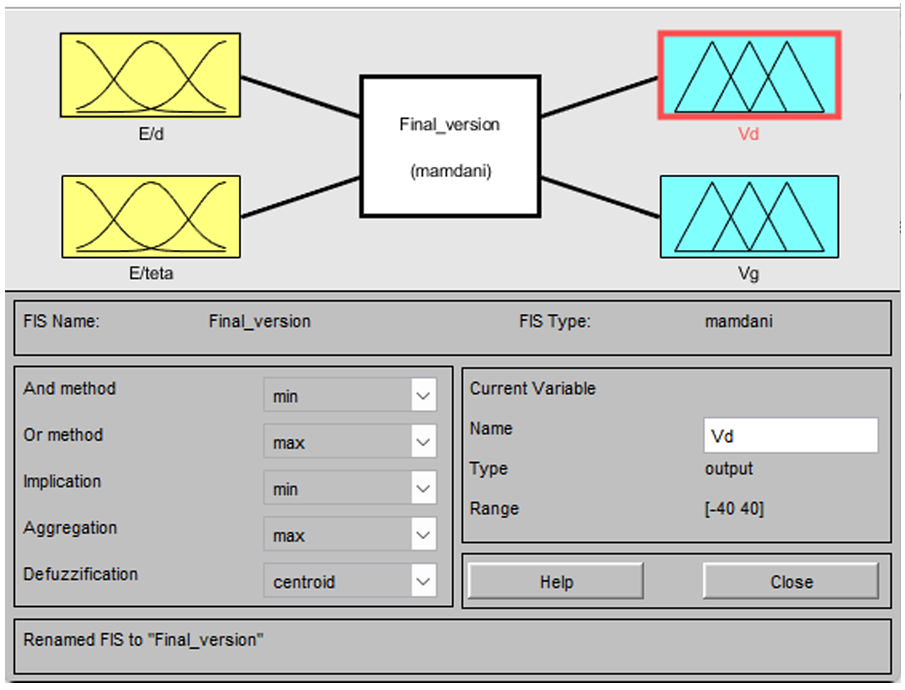
- Designed a fuzzy inference system using the Mamdani model.
- Defined fuzzy sets for input and output variables.
- Established membership functions for distance errors and angular errors.
- Created rule-based decision-making for movement control.
-
Kinematic Modeling of the Robot
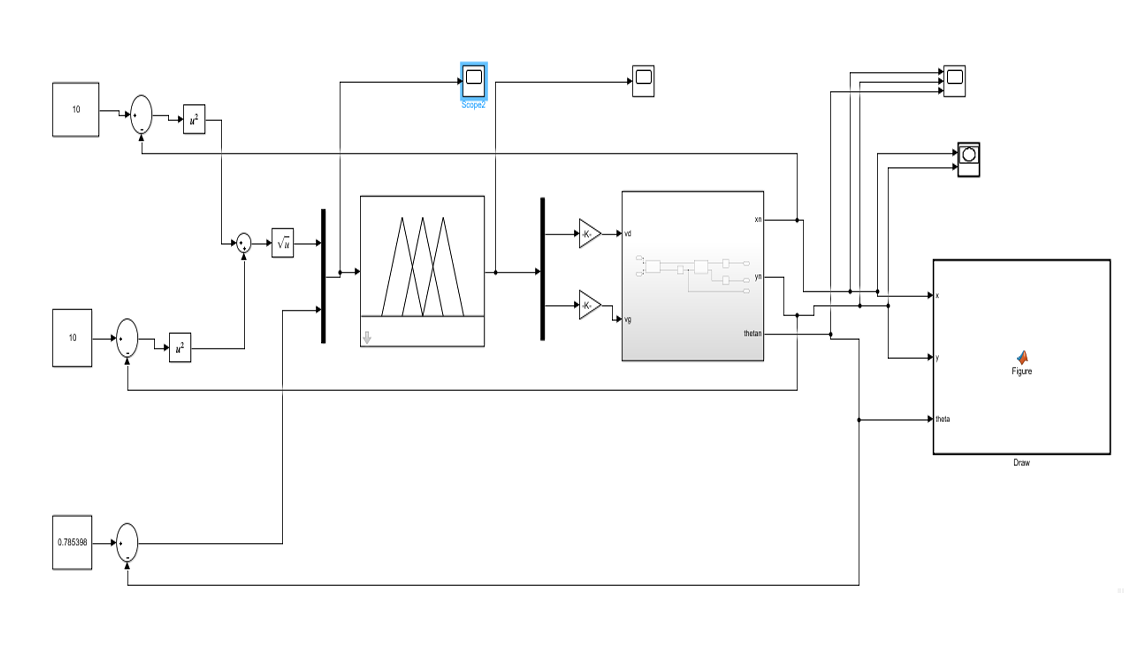
- Implemented the kinematic model for a differential drive robot.
- Simulated real-time movement of the robot based on velocity inputs.
- Integrated odometry-based localization.
-
Simulation in MATLAB/Simulink
- Created a simulation environment to test different navigation scenarios.
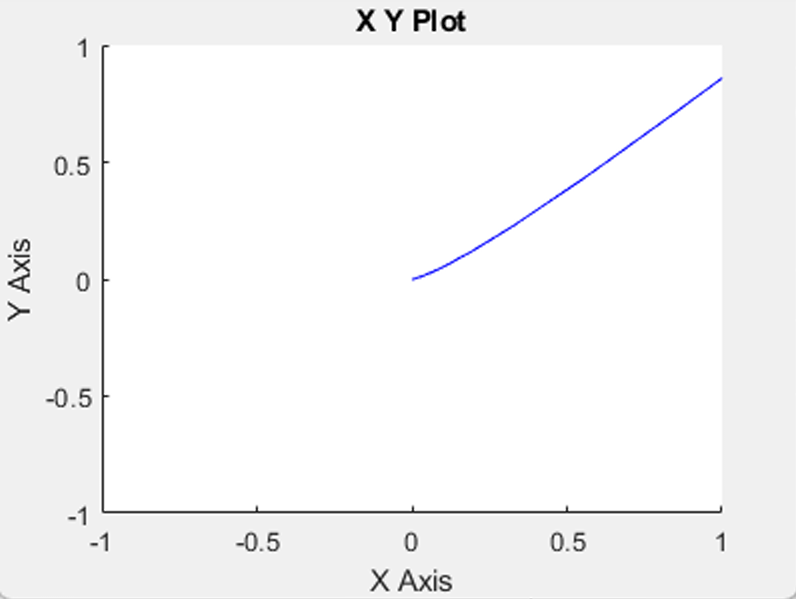
- Visualized robot trajectories, angular adjustments, and velocity changes.
- Conducted multiple test cases to fine-tune fuzzy rules.
Results & Findings
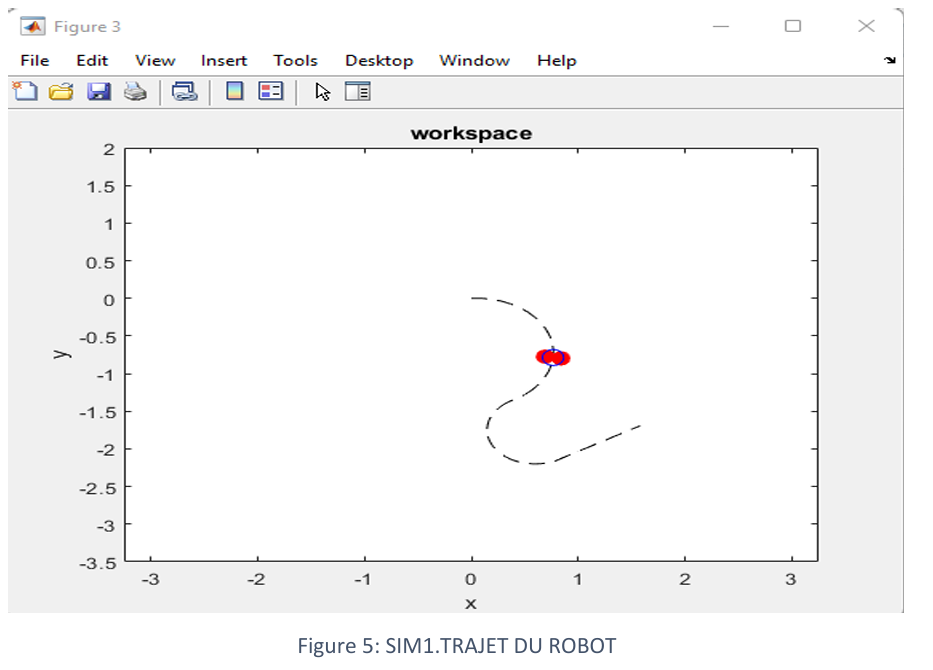
- Successfully achieved smooth and adaptive navigation using fuzzy logic.
- The robot effectively corrected its trajectory in response to positional errors.
- The fuzzy control system showed improved stability in comparison to conventional PID controllers.
- Achieved realistic trajectory tracking under simulated conditions.
Future Improvements
- Integration with Machine Learning: Implementing neuro-fuzzy learning to enhance adaptation.
- Hardware Implementation: Deploying the controller on a real mobile robot platform.
- Obstacle Avoidance: Enhancing the system with ultrasonic or LiDAR sensors.
- Cloud-Based Monitoring: Logging navigation data for remote analysis.
Contributors
- Imad-Eddine NACIRI
- Achraf Berriane
- Errouji Oussama